
Cintoo Cloud
説明
Cintoo proposes a revolutionary new model to handle the gigantic point clouds generated from terrestrial laser scans. Developed with a focus on BIM workflows in the AEC industries, Cintoo Cloud™ offers a unique point cloud-to-mesh technology, enabling users to access high precision terrestrial laser scans on-demand via the cloud using advanced mesh streaming technologies. With Cintoo Cloud, even high-resolution data (billions of points) from large projects (thousands of scans) can be manipulated in 3D using a standard WebGL browser such as Google Chrome or Mozilla Firefox, without quality reduction or data simplification.
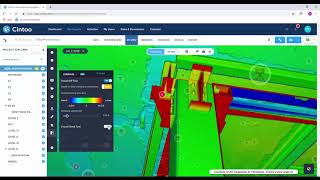
Cintoo’s mesh-based Reality Data is a new generation of Reality Data that is cloud-compatible, making it collaborative, distributable and shareable. Cintoo Cloud reads point cloud data coming from Autodesk® ReCap™ or any other point cloud software using the Autodesk RCP format or the E57 exchange format and will turn it to 3D meshes (1 mesh per scan position) prior to the upload, thus dividing the size of the point cloud data to upload by 10 to 30. Once turned into 3D meshes and uploaded to the cloud, the solution offers powerful visualization features in 2D or 3D, with display modes in RGB, X-ray, height map or 3D Surface, that reveals a granular level of scan detail never seen before.
From a workflow perspective, the user can organize a project into Work Zones (rooms/floors), assigning specific scans to each zone and then viewing or exporting only the necessary data for a Scan-to-BIM job.
The scan data can be shared with no limit in the number of users, either by adding team members whose rights can be set by the BIM/VDC Manager, or by sharing the 3D viewer via a simple URL.
Crops of project sections and elevations can also be easily created, saved and assigned to team members. Measurements can be performed, and annotations (notes, private notes, issues) can be created to inform other team members.
Cintoo Cloud™ enables Scan-to-BIM and Scan-vs-BIM workflows, allowing laser scanning to be fully integrated into collaborative BIM processes.
For Scan-to-BIM, users can turn back a set of scans, a work zone, slices, and crops or the whole project in its original point cloud format for consumption in desktop apps such as Autodesk® Revit®, Autodesk® AutoCAD® or Autodesk® Navisworks®. Cintoo Cloud automatically generates the reconstructed point cloud in the RCS format after downloading with no compromise on accuracy, for a native consumption in the Autodesk portfolio.
For Scan-vs-BIM, users can connect Cintoo Cloud to Autodesk® BIM 360® Docs to pull their BIM model and overlay it over the scan data in Cintoo Cloud Viewer. Advanced comparison tools then allow to visually detection issues, and any user can inform the project stakeholders by generating annotations in BCF (BIM Collaboration Format). Those issues derived from the as-builts comparison to the BIM model can then be tracked using any issue tracking solution or positioned in 3D in Autodesk desktop apps.
Cintoo Cloud runs on WebGL-compatible browsers such as Google Chrome or Mozilla Firefox. It does not run on Internet Explorer.
Cintoo Cloud offers 3 cloud hosting options:
1) Data anywhere with CDN (Content Delivery Network) activated,
2) Data uploaded to a specific, user-selected Data Center on either Amazon AWS or Microsoft Azure, or
3) Data hosted in the enterprise data center.
Note: App is compatible with Autodesk® Build and BIM 360 Docs.
体験版の説明
Cintoo Cloud is available with a free trial for 30 days by visiting Cintoo's web site: https://cintoo.com/. Free trial users get access to a 60 scan project already uploaded, and can also upload up to 20 of their own scans and use them with the full features of Cintoo Cloud for one month.










reality capture instruments like terrestrial laser scanners are a big jump towards digitalization in the AEC industry but their output point clouds are so big and difficult to handle with for architects and contractors. With Cintoo I finaly can share my laser scanner data with collegues and clients to evaluate and explore and check and QA/QC my BIM digital twin as the final delivery of a scan to BIM workflow. Great tool. Many thanks
My first VR experience, inside my own point cloud data, was with Cintoo cloud. The software's ability to compress big data, streaming it to the average user to consume, provides many great features all within a standard browser interface.